Гондуров С.А., Михалев С.В., Пирогов М.Г., Захаров
О.Г., НТЦ «Механотроника», С-Петербург
Данная работа продолжает серию статей [1,
2, 10, 14, 18], в которых рассмотрены примеры расчета уставок для разных
алгоритмов цифровых устройств релейной защиты.
Как
и ранее, расчёт уставок произведен в первичных значениях токов, а после его
окончания все уставки переведены во вторичные значения
Часть
6 Защита электродвигателей от перегрузки с помощью алгоритма «тепловая модель
электродвигателя»
Тепловая защита электродвигателей с помощью алгоритма
«Тепловая модель электродвигателя» предназначена для предотвращения повреждения
изоляции электродвигателя вследствие теплового действия токов обусловленных симметричными
и несимметричными перегрузками, (блокировкой ротора, затянувшимся пуском и
самозапусками, обрывов фаз питающей сети и т.д.).
Данный алгоритм позволяет оценить перегрев двигателя
косвенно - по значению и длительности протекания тока в обмотках статора.
Часто в электродвигателях устанавливаются датчики
измерения температуры в обмотках и активном железе статора. Таким образом,
обеспечивается тепловая защита электродвигателя, основанная на результатах
непосредственного измерения температуры, что позволяет наиболее полно
использовать перегрузочные возможности электродвигателя.
Однако следует отметить, что ГОСТ Р 52776-2007 [16]
допускает, в зависимости от класса изоляции
(табл.
1), увеличивать предельно допустимое значение перегрева не более, чем на 40°С (при температуре окружающей среды 0°С (см. также [15]).
Таблица 1 Классы изоляции
|
Класс изоляции |
А |
E (исп. по A) |
B (исп. по E) |
F (исп. по B) |
H (исп. по F) |
|
Предельно допустимая
температура перегрева, °С |
65 |
80 |
90 |
115 |
140 |
|
1,000 |
1,231 |
1,125 |
1,278 |
1,217 |
Табл. 1 составлена для работы двигателя при
температуре окружающей среды 40°С
[20]. При составлении таблицы учитывалось, что при токах, не превышающих
номинальный ток двигателя, изоляция обычно используется по более низкому
температурному классу, например изоляция класса F используется как изоляция класса В. При других
условиях работы машины требуется проведение дополнительных расчетов.
Рассмотрим подробнее тепловую модель электродвигателя,
используемую в цифровых устройствах серии БМРЗ [19] (рис. 1).
|
|
|
Рис. 1 Графическое представление алгоритма «Тепловая
модель электродвигателя» |
На рис. 1 приняты такие обозначения:
Iш – расчетный ток двигателя (выбирается равным
номинальному току двигателя);
![]() - постоянная времени
нагрева электродвигателя, мин;
- постоянная времени
нагрева электродвигателя, мин;
![]() - постоянная
времени охлаждения электродвигателя, мин;
- постоянная
времени охлаждения электродвигателя, мин;
![]() - уставка, при которой разрешено включение
электродвигателя после срабатывания защиты, %;
- уставка, при которой разрешено включение
электродвигателя после срабатывания защиты, %;
![]() - уставка пуска второй
ступени защиты (действует на сигнализацию), %;
- уставка пуска второй
ступени защиты (действует на сигнализацию), %;
![]() - уставка пуска первой
ступени защиты (действует на сигнализацию или на отключение), %.
- уставка пуска первой
ступени защиты (действует на сигнализацию или на отключение), %.
При отсутствии информации о значениях ![]() и
и ![]() в документации
электродвигателя, их определяют экспериментальным путем по методике, описанной
ниже.
в документации
электродвигателя, их определяют экспериментальным путем по методике, описанной
ниже.
Относительная величина перегрева статорных обмоток
электродвигателя Eнагр,% за
временной интервал работы (нагрева) электродвигателя tнагр рассчитывает процессор
цифрового устройства релейной защиты по выражению (38)[2]:
|
|
,
% (38) |
где Iэкв – эквивалентный ток электродвигателя, А;
Iш – расчетный ток электродвигателя, А;
E0,% – относительная величина перегрева двигателя на момент
начала процесса нагрева, %. Перегрев электродвигателя при длительной
номинальной нагрузке принят за 100%. При температуре обмоток равной температуре
окружающей среды E0,% = 0%;
Te1 –
постоянная времени нагрева электродвигателя, мин;
tнагр – время работы
электродвигателя (время нагрева), мин.
Значение эквивалентного тока определяют по формуле
(39):
|
|
,А
(39) |
где
Iфазн.макс
– значение максимального из фазных токов, А;
I2 – значение тока обратной последовательности, А.
Алгоритм защиты
«Тепловая модель электродвигателя» рекомендуется выполнять с двумя
ступенями, действующими на сигнализацию. На объектах без постоянного
обслуживающего персонала рекомендуется использовать одну ступень.
Рассмотрим пример расчета уставок для
данного алгоритма защиты, используя следующие исходные данные:
Мощность на валу двигателя: ![]()
Номинальный ток двигателя: ![]() А
А
Напряжение: ![]()
Кратность пускового тока: kпуск=5,5
Кратность пускового момента 1,9
Номинальная частота вращения двигателя: ![]() об/мин
об/мин
Двигатель соответствует требованиям ГОСТ Р 52776-2007 [16].
Пуск АД прямой от напряжения питающей сети, проектное
время пуска - ![]()
Охлаждение обмоток статора – косвенное. Вентилятор
охлаждения закреплен на валу двигателя.
Класс изоляции двигателя F с использованием по классу В (см. табл.1).
Расчетное значение тока Iш принимаем равным номинальному току электродвигателя:
|
|
(40) |
В выражении (38) при вычислениях используют значение
эквивалентного тока Iэкв и времени работы электродвигателя tнагр в минутах. Вычислительная программа находит значение
эквивалентного тока Iэкв по формуле (39).
Таким образом, находят текущее относительное значение
температуры статорной обмотки электродвигателя. Если расчётное относительное
значение температуры превышает относительное значение параметра срабатывания
защиты, то алгоритм защиты от тепловой перегрузки срабатывает.
Для проведения вычислений по формуле (38) необходимо
знать максимально допустимую постоянную времени нагрева электродвигателя Te1 .Для этого используем приведенную в работе [21]
формулу (41), связывающую между собой величины, определяющие процесс нагрева
электродвигателя:
|
|
(41) |
После преобразований получим:
|
|
, мин (42) |
Где – А – тепловая постоянная времени охлаждения
обмотки статора
kmax - предельная кратность перегрева относительно
перегрева при номинальном токе.
Значение kmax указано в табл. 1.
При отсутствии информации о тепловой постоянной
времени охлаждения обмотки статора А можно воспользоваться формулой (35),
приведенной в работе [17]:
|
|
,с (35) |
Где А –
постоянная времени охлаждения статорной обмотки, с;
![]() - допустимое время работы при кратности тока
- допустимое время работы при кратности тока ![]() .
.
Эта формула позволяет оценить минимально допустимую
постоянную времени охлаждения статора А. Например, согласно
требованиям стандартов [15, 16], трёхфазные двигатели отечественного
производства мощностью не менее 0,55 кВт с косвенным охлаждением обмоток
статора, должны в течение 2 мин выдерживать ток, равный 1,5 Iном.
|
Пример 6: 6.1 Подставив в формулу (35) указанные выше
значения
|
В
зависимости от типа и мощности защищаемого электродвигателя значение А может находиться в диапазоне от 60 до
300 с.
Зная постоянную
времени охлаждения статора А
можно найти постоянную времени нагрева электродвигателя Te1 (в том случае, когда электродвигатель соответствует
требованиям стандартов [15, 16]):
|
Пример 6: 6.2 Подставив значения величин в формулу (42) получим:
6.3 Значение kmax принято равным 1, 278 (см. табл. 1), так как
двигатель с изоляцией класса F используется при температуре, соответствующей классу
изоляции В. |
Для определения параметра Es1
предварительно необходимо по формуле (43) найти расчётное значение нагрева
двигателя за время пуска Eпуск:
|
|
(43) |
В зависимости от типа электродвигателя
значение kпуск может
находиться в диапазоне от 3 до 8 Iном.дв .Сог-ласно исходным данным для расчета значение kпуск = 5,5 Iном.дв.
|
Пример
6: 6.4 Подставив данные в формулу (44) получим:
|
Расчётное допустимое значение относительного перегрева
![]() при котором разрешается пуск машины находим по
формуле (44):
при котором разрешается пуск машины находим по
формуле (44):
|
|
,% (44) |
Находим значение величины ![]() :
:
|
Пример 6: 6.5 После подстановки получаем:
6.6 Полученное значение округляем в меньшую сторону и
принимаем |
Два оставшихся параметра пуска тепловой защиты
электродвигателя на сигнализацию и отключение ![]() и
и ![]() определяют по формуле (45):
определяют по формуле (45):
|
|
(45) |
где 100% - относительная температура
нагрева электродвигателя при номинальном токе;
![]() - ток, потребляемый электродвигателем;
- ток, потребляемый электродвигателем;
![]() - номинальный ток электродвигателя.
- номинальный ток электродвигателя.
При определении параметра ![]() (для второй
ступени алгоритма, работающей на сигнализацию) учитываем возможность длительной
работы электродвигателя в сети с напряжением, равным 110% Uном [24], и поэтому отношение токов принимаем равным
(для второй
ступени алгоритма, работающей на сигнализацию) учитываем возможность длительной
работы электродвигателя в сети с напряжением, равным 110% Uном [24], и поэтому отношение токов принимаем равным ![]() (т.е. перегрузка
возникает при токе >0,9Iном).
(т.е. перегрузка
возникает при токе >0,9Iном).
|
Пример 6: 6.7 Подставив в формулу (49) приведенное выше отношение
токов, получим:
|
При определении параметра ![]() (для первой ступени алгоритма, работающей на
сигнализацию или отключение) учитываем возможность длительной работы
электродвигателя в сети с напряжением, равным 90% Uном [24],
и поэтому отношение токов принимаем равным
(для первой ступени алгоритма, работающей на
сигнализацию или отключение) учитываем возможность длительной работы
электродвигателя в сети с напряжением, равным 90% Uном [24],
и поэтому отношение токов принимаем равным ![]() (т.е. перегрузка
возникает при токе >1,1Iном).
(т.е. перегрузка
возникает при токе >1,1Iном).
|
Пример 6: 6.8 Подставив в формулу (49) приведенное выше отношение
токов, получим:
|
Относительное значение перегрева при охлаждении
остановленного двигателя процессор рассчитывает по формуле (46):
|
|
,% (46) |
где
E0,% –перегрев двигателя на момент начала процесса
охлаждения, %;
Te2 –
постоянная времени охлаждения электродвигателя, мин;
tохл – время охлаждения, мин.
Постоянную времени охлаждения ![]() выбираем сообразно эффективности работы
системы охлаждения на остановленном электродвигателе.
выбираем сообразно эффективности работы
системы охлаждения на остановленном электродвигателе.
При наличии системы охлаждения, эффективность которой
не зависит от частоты вращения вала, значение ![]() принимаем равной постоянной времени нагрева Te1.
принимаем равной постоянной времени нагрева Te1.
Если же электродвигатель охлаждается вентилятором,
закрепленным на валу, то постоянную времени ![]() ,
выбираем в 2 ÷ 4 раза больше постоянной времени нагрева Te1.
,
выбираем в 2 ÷ 4 раза больше постоянной времени нагрева Te1.
Поскольку в рассматриваемом электродвигателе вентилятор
охлаждения закреплен на валу двигателя, принимаем постоянную охлаждения
двигателя в четыре раза больше постоянной нагревания:
|
|
(47) |
Полученная по результатам расчетов характеристика
алгоритма «Тепловая модель электродвигателя» приведена на рис. 2.
|
|
|
Рис. 2 Расчетная характеристика алгоритма «Тепловая модель электродвигателя» |
Для более полного использования перегрузочных
возможностей машины рекомендуется при проведении пуско-наладочных работ
экспериментально определять реальные значения постоянных времени нагрева и
охлаждения как это описано ниже и в работах [22, 23, 25].
Постоянные времени нагрева Te1 и охлаждения Te2 определяют экспериментальным путем, оценивая
скорости нагревания и охлаждения электродвигателя.
При наличии в двигателе встроенных датчиков
температуры температуру двигателя определяют по их показаниям. Если встроенные
датчики отсутствуют, то для определения температуры наружной поверхности
статора электродвигателя используют переносные термометры. В этом случае
желательно обеспечивать температуру окружающей среды постоянной.
Перед проведением
эксперимента электродвигатель останавливают на время, необходимое для полного
остывания, как внешней поверхности двигателя, так и его внутренних частей.
Продолжительность
остывания в зависимости от его конструктивных
особенностей и габаритов при
отсутствии независимого охлаждения может составлять от
10 до 20 часов.
При
наличии независимого охлаждения остановленного электродвигателя время
охлаждения существенно
сокращается и составляет от 1 до 2 часов.
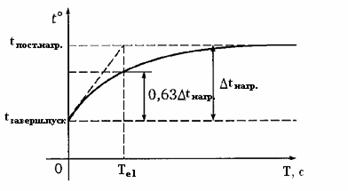
После
измерения температуры холодного двигателя производится его пуск и снимается
характеристика нагрева двигателя – зависимость температуры от времени работы
при постоянной нагрузке, составляющей не менее 50% номинальной (рис. 3).
|
|
|
Рис. 3 График нагрева
электродвигателя |
Температура двигателя необходимо измерять каждые 60 с.
Для повышения точности желательно выполнить не менее 100 измерений. Для
сокращения продолжительности процесса можно применить метод, описанный в
статьях [22, 23] и таким образом определить установившееся значение температуры
при постоянной нагрузке..
Разность температур
двигателя через 60 с после запуска из холодного состояния (tзаверш.пуск.)
и двигателя при длительной работе при постоянной нагрузке (tпост.нагр.)
принимается за Δtнагр, т.е.:
|
∆tнагр.= tпост.нагр.–tзаверш.пуск |
, °С
(48) |
Постоянную времени
нагрева Te1 определяют как время от момента измерения температуры tзаверш.пуск. до
момента достижения температурой значения t заверш.пуск. + (Δtнагр●0,632 °С).
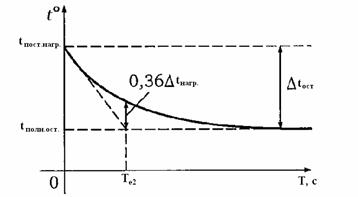
После остановки электродвигателя
снимают график его охлаждения (рис. 4), также производя измерения через каждые
60 с.
При этом
независимые устройства охлаждения двигателя должны находиться в таком состоянии
(включены или выключены), в каком они находятся при остановленном двигателе в
условиях эксплуатации.
|
|
|
|
Рис. 4 График
охлаждения электродвигателя |
|
По
полученному графику определяется установившееся значение температуры остановленного
холодного электродвигателя, которое должно соответствовать температуре до его пуска.
Разность температур
двигателя при постоянной нагрузке (tпост.нагр.) и полностью остывшего после работы на постоянную
нагрузку двигателя (tполн.ост.2) принимают за Δtост.,
т.е.:
|
Δtост = tпост.нагр
- tполн.ост. |
(49) |
Постоянная времени охлаждения Те2
определяют как время от момента отключения двигателя до
достижения
температурой значения tполн.ост.+ (Δtост.●0,368) °С.
Как
правило, постоянная времени охлаждения в 2 - 4 раза больше постоянной времени нагрева.
После задания в блоке
постоянных времени Те1 и Те2, а также расчетного тока
двигателя Iш необходимо проверить правильности работы тепловой
модели.
Проверка осуществляется
аналогично описанному выше, при этом кроме текущей температуры двигателя каждые
60 секунд фиксируется значение перегрева, индицируемое на дисплее цифрового
устройств БМРЗ.
После завершения
эксперимента на основе полученных значений строится график процессов нагрева и
охлаждения. На графике установившееся значение перегрева, индицируемое на дисплее
БМРЗ, приравнивается к установившейся температуре двигателя при постоянной
нагрузке.
Погрешность тепловой
модели в каждой точке измерения оценивают по формуле (50):
|
|
, %
(50) |
где tТМ
- текущее значение перегрева, отображаемое
на дисплее устройства БМРЗ, %;
t
двиг.уст. - установившееся значение
повышения температуры двигателя относительно температуры полностью остывшего
двигателя, °С;
tТМ.уст - установившееся значение перегрева,
отображаемое на дисплее устройства БМРЗ, %;
tдвиг- текущее значение превышения температуры
электродвигателя относительно температуры холодного электродвигателя, °С
Если значение ∆t не превышает ±5 °С, настройка алгоритма «Тепловая модель
электродвигателя» считается
успешной.
Литература
1.
Гондуров С.А., Михалев С.В., Пирогов М.Г., Захаров О.Г. Расчет уставок для цифровых устройств релейной защиты. Токовая отсечка.
//Материал размещен на страницах: http://bmrz-zakharov.narod.ru/raschet/to.htm
и http://www.elec.ru/articles/raschet-ustavok-dlya-cifrovyh-ustrojstv-relejno/
2. Гондуров С.А., Михалев
С.В., Пирогов М.Г., Захаров О.Г. Расчет
уставок для цифровых устройств релейной защиты. Дифференциальная защита
электродвигателя. //Материал размещен на странице http://bmrz-zakharov.narod.ru/raschet/DZT_DTO.htm
3. Королев Е.П., Либерзон
Э.М. Расчеты допустимых нагрузок в токовых цепях релейной защиты. М.: Энергия,
1980.
4. Правила устройства
электроустановок. М.: Госэнергонадзор России, 1998, 608 с.
5. Шабад М.А. Трансформаторы
тока в схемах релейной защиты. Экспериментальная и расчетная проверки. Конспект
лекций. СПб, ПЭИПК, 2010.
6. Шнеерсон Э.М. Цифровая
релейная защита. М.: Энергоатомиздат, 2007, 549 с.
7. Александров А.М. Выбор
уставок срабатывания защит асинхронных электродвигателей напряжением выше
8 Информация об алгоритмах,
выполняемых блоками БМРЗ и БМРЗ-100 различных исполнений и модификаций //
Материал размещен на странице: http://bmrz-zakharov.narod.ru/algoritmy.htm
9. Алгоритмы защиты, выполняемые БМРЗ// Материал размещен на странице: http://bmrz-zakharov.narod.ru/new/_ANSI.htm
10 Гондуров С.А., Михалев С.В., Пирогов М.Г., Захаров
О.Г.Расчет уставок для цифровых устройств релейной защиты. Часть 3. Алгоритм
дифференциальной защиты электродвигателя с торможением.// Материал размещен на
странице: http://bmrz-zakharov.narod.ru/raschet/DZT_DTO2.htm//
11. Слодарж М.И. Режимы работы, релейная защита и
автоматика синхронных двигателей. М.: Энергия, 1977.
12. Шабад М.А. Защита от однофазных замыканий на землю
в сетях 6-35 кВ. СПб, ПЭИПК, 2001
13. Рекомендации по выбору алгоритмов зашит
электродвигателей, предусмотренных в блоках БМРЗ и БМРЗ-100// Материал размещен
на странице: http://bmrz-zakharov.narod.ru/Zash.htm
14. Гондуров С.А., Михалев С.В., Пирогов М.Г., Захаров
О.Г.Расчет уставок для цифровых устройств релейной защиты. Часть 4. Защита от
замыканий на землю// Материал размещен на странице: http://bmrz-zakharov.narod.ru/raschet/ZZ2.htm
15. ГОСТ 183-74. Межгосударственный стандарт. Машины
электрические вращающиеся. Общие технические условия, изд. июль
16. ГОСТ Р 52776-2007. Национальный стандарт РФ. Машины
электрические вращающиеся. Номинальные данные и характеристики.
(введен 01.01.2008 г.)
17. Корогодский В.И., Кужеков С.Л.,
Паперно Л.Б. Релейная защита электродвигателей напряжением выше 1 кВ. –
М.:Энергоатомиздат, 1987
18. Гондуров С.А., Михалев С.В., Пирогов М.Г., Захаров
О.Г. Расчет уставок для цифровых
устройств релейной защиты. Часть 5 Защита электродвигателей от
перегрузки. Материал размещен на странице: http://www.bmrz-zakharov.narod.ru/raschet/overload.htm
19. Исследование
цифровых устройств защиты электродвигателей серии БМРЗ-Д на физической
модели.// Статья размещена на странице :http://www.olgezaharov.narod.ru/BMRZ-D.pdf
20.
ГОСТ 8865-93. Межгосударственный стандарт. Системы электрической изоляции.
Оценка нагревостойкости и и классификация.
21. Сыромятников И.А. Режимы
работы асинхронных и синхронных двигателей. М.: Энергоатомиздат, 1984.
22. Захаров О.Г., Фрейцис
И.И. Метод определения коэффициента загрузки асинхронного электродвигателя.
//Вопросы судостсроения,
серия Судовая электротехника и связь, 1985, вып. 42, С.78
23. Захаров О.Г., Фрейцис
И.И. Энергосберегающий метод испытаний на нагревание судового
электрооборудования.// Вопросы судостроения, серия Промышленная энергетика,
1983, вып. 3 , С. 82.
24. ГОСТ 13109-97.
Межгосударственный стандарт. Электрическая энергия. Совместимость технических
средств электромагнитная. Нормы качества электрической энергии в системах
электроснабжения общего назначения.
25. ДИВГ.648228.001 Д3.Методические указания по расчету уставок защит
синхронных и асинхронных электродвигателей 6 – 10 кВ.// Материал размещен на
странице: http://rzdoro.narod.ru/mtr_1.files/murz_6_10.pdf
[1] kmax
- предельная кратность
перегрева относительно перегрева при номинальном токе
[2] Нумерация формул продолжает нумерацию, начатую в [1]
 :::
МОИ САЙТЫ
:::
:::
МОИ САЙТЫ
:::